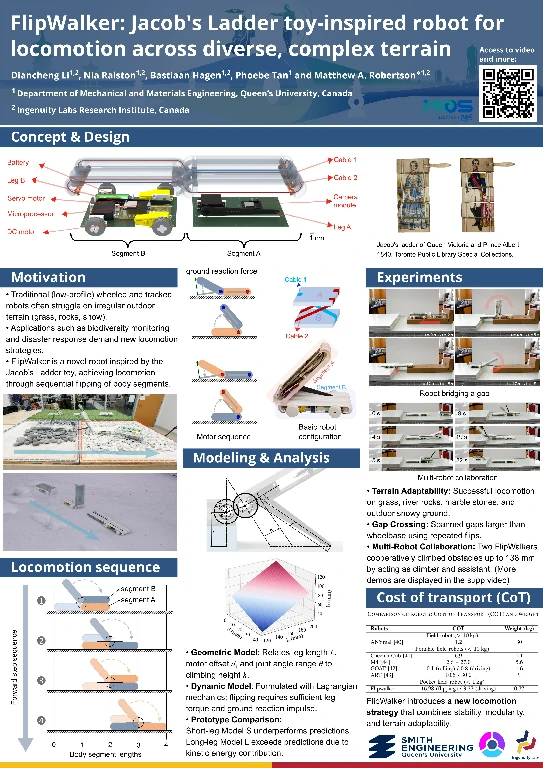
Concept & Motivation
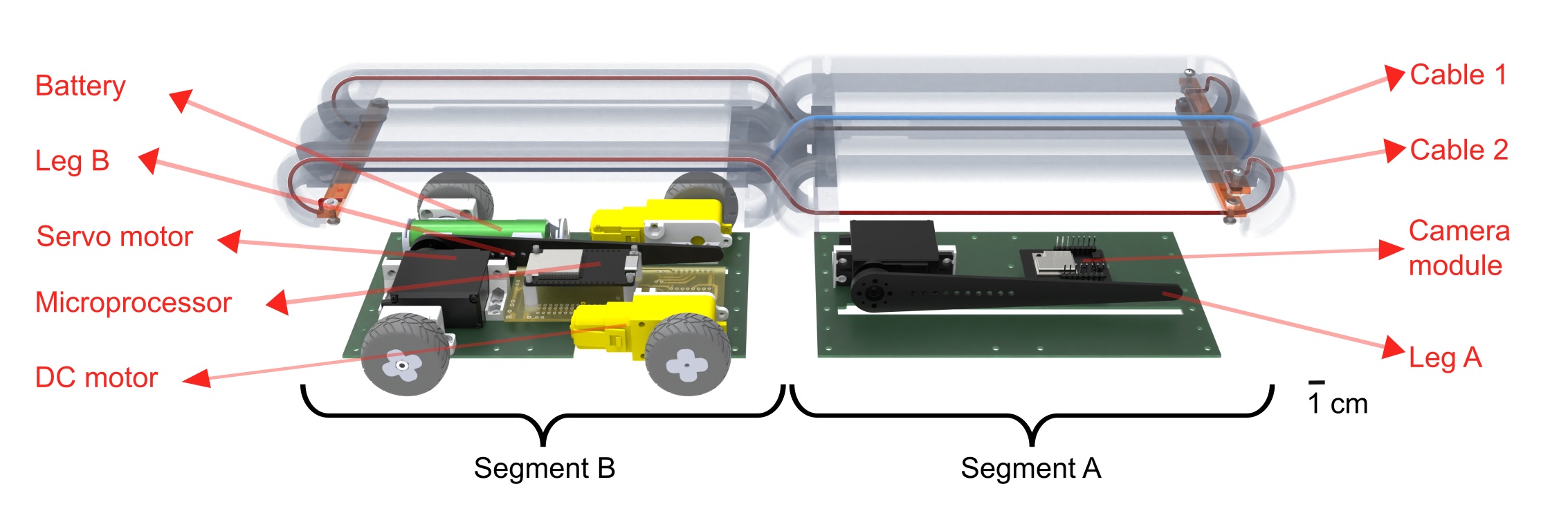
FlipWalker is an underactuated robot that advances by sequentially flipping two interconnected body segments joined by flexible cables. Inspired by the Jacob's Ladder toy, it combines stability, modularity, and terrain adaptability.
- Operates on grass, river rocks, marble, and snow.
- Crosses gaps larger than its wheelbase using repeated flips.
- Collaborates with other FlipWalkers to climb obstacles.
ArXiv link: https://arxiv.org/abs/2508.19380